-
09h00
Accueil
-
09h30 - 10h05 - Talk 1
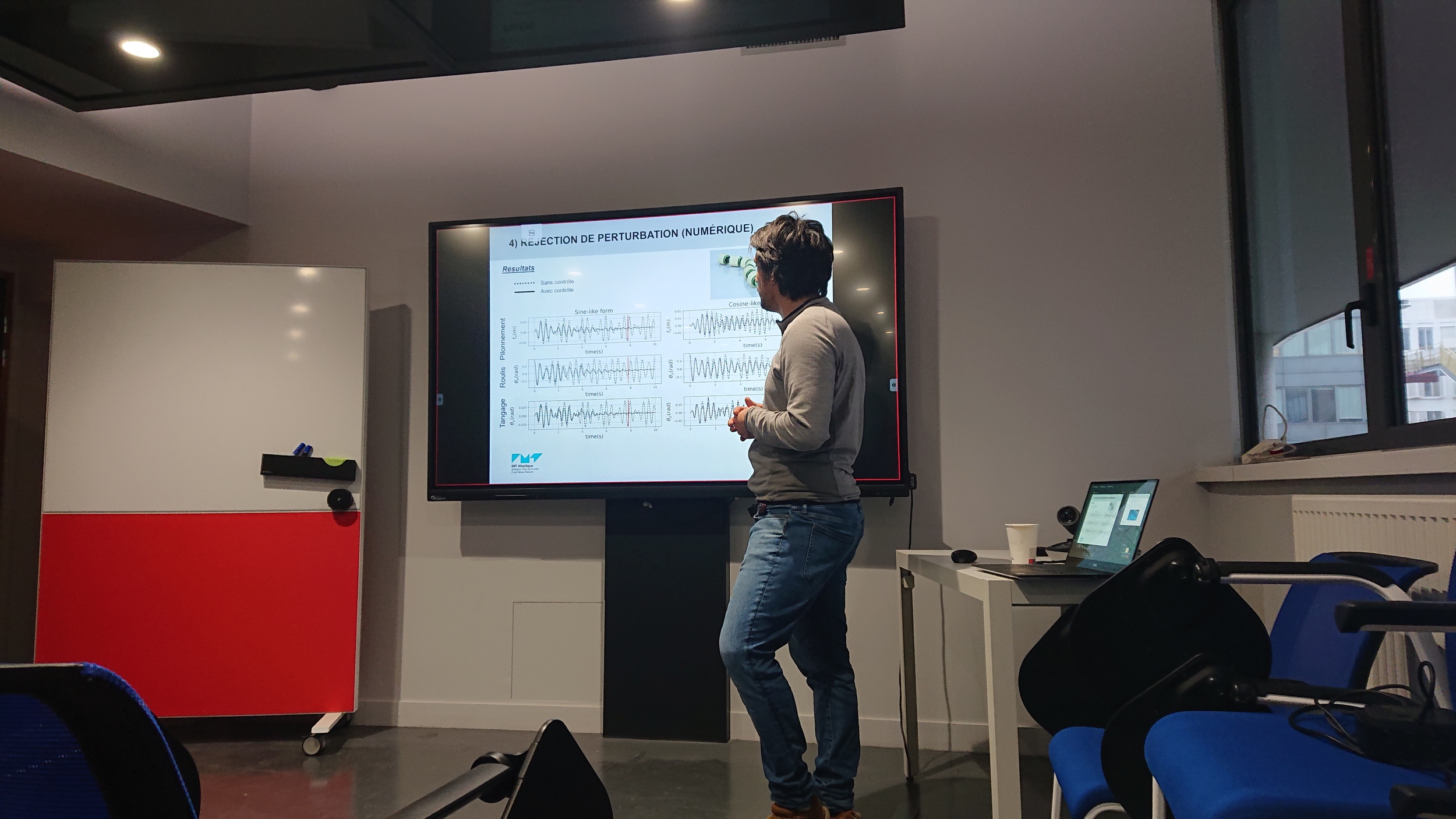
Stabilité en surface des robots bio-inspirés
Johann Herault
Je présenterai notre nouvelle plateforme robotique spécialement conçue pour étudier et atténuer l'instabilité de roulement que connaissent les robots bio-inspirés hyper-redondants nageant à la surface de l'eau. Après avoir répertorié les défis de cette stabilité, je décrirai les spécificités de notre nouveau robot serpentiforme nommé NATRIX. Ensuite, je proposerai un panel inédit de stratégies de contrôle de la stabilité en surface des robots hyper-redondants. Finalement, je conclurai cet exposé sur le futur du projet, ainsi que de ses conséquences sur notre compréhension du monde animal.


-
10h05 - 10h40 - Talk 2
Estimation des performances d'un robot sous marin, comment trouver la vérité terrain ?
Karen Godary-Dejean
Télécharger la présentation
Résumé à venir.

-
10h40 - 11h00
Pause et discussions
-
11h00 - 11h35 - Talk 3
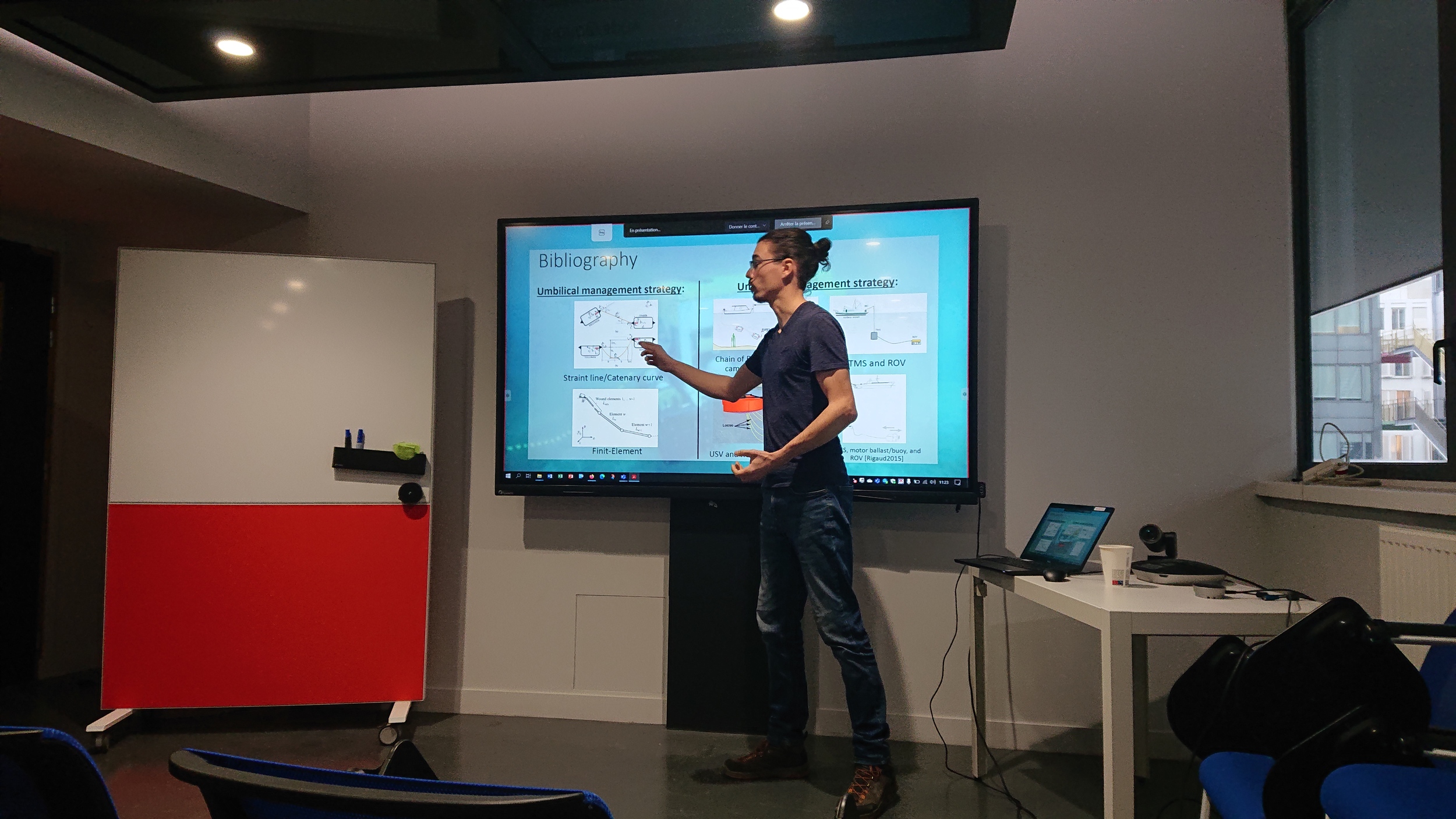
Modélisation ombilical d'un ROV équippé d'éléments glissants
Christophe Viel
Télécharger la présentation
L'ombilical des véhicules télécommandés (ROV) présente deux problèmes principaux : il est susceptible de s'emmêler avec des obstacles ou lui-même, et sa forme est difficile à prévoir pour la navigation. Pour résoudre ces problèmes, une auto-gestion passive de l'ombilical d'un ROV est proposée, adaptée à l'exploration sous-marine des fonds marins. En ajoutant deux éléments flottant ou coulant (bouées ou ballasts) se déplaçant librement sur l'ombilical, la méthode décrite permet d'éviter l'auto-enchevêtrement du câble en le tendant, et lui donne une forme prévisible. Un modèle de calcul rapide du câble est proposé pour fournir un retour d'information à l'opérateur. Les éléments glissants se déplacent d'eux-mêmes pour maintenir le câble tendu sans système motorisé, ce qui rend cette méthode facile à adapter aux ROVs existants avec peu de contraintes sur leur navigation.


-
11h35 - 12h10 - Talk 4
La Robotique d'Exploration Karstique
Lionel Lapierre
Le karst joue un rôle fondamental dans le stockage et la dynamique des eaux souterraines. Il draine la ressource sur des échelles énormes et contribue à l'amplification (ou l'atténuation) des effets catastrophiques des épisodes cévenols. La connaissance de la dynamique de ces réseaux souterrains est un enjeu primodial et l'outil d'exploration robotique peut être un outil déterminant pour le recueil de connaissances sur les karst profonds. L'environnement karstique, subaquatique confiné et non structuré, est un terrain expérimental qui impose de repenser les solutions robotiques actuellement en vigueurs.
-
12h10 - 13h40
Pause déjeuner libre
Repas non prévus, mais facilités pour se restaurer à l'extérieur.
-
13h40 - 14h15 - Talk 5
Commande d’un AUV type torpille en milieu contraint
Quentin Brateau
Télécharger la présentation
Les AUVs présentent de nombreux avantages par rapport aux ROVs comme notamment l’absence d’un ombilical et la possibilité de réaliser des missions couvrants de larges espaces. En contrepartie, les AUVs doivent embarquer une autonomie décisionnelle et énergétique. Il faut donc concevoir des lois de commandes robustes rendant la navigation de tels engins plus sûre. Une modélisation d’un AUV de type torpille sera proposé à des fins de simulation et d’élaboration de lois de commandes. Puis des lois de commandes simples seront présentées permettant une navigation inertielle dans un milieu contraint, comme dans une piscine ou un port.
-
14h15 - 14h50 - Talk 6
Bilan du Submeeting 2022
Claire Dune
Télécharger la présentation
Les journées du Submeeting 2022 ont eu lieu cette année en Avril à Saint Raphaël sur le thème de la cartographie 3D et de la localisation autonome. Elles ont réuni entre autres les équipes de recherche en robotique sous marine de l'EPITA Paris de l'ENSTA Bretagne, du CNRS I3S et de l'Université de Toulon. Les expérimentations se sont articulées autour d'une mission collaborative d'acquisition de données multimodales et des expérimentations propres à chaque laboratoire présent. Elles ont été riches en enseignements et je vous propose de vous en faire le bilan.


-
14h50 - 15h10
Pause et discussions
-
15h10 - 15h45 - Talk 7
Optimisation d'une chaîne de reconstruction 3D sous-marine pour une utilisation online
Loïca Avanthey et Laurent Beaudoin
Télécharger la présentation
(ou Vecteurs et capteurs légers pour la télédétection rapprochée multi-milieux : architecture unifiée)

-
15h45 - 16h20 - Talk 8
Développements récents en robotique pour l'archéologie sous-marine
Vincent Creuze
Présentation des derniers résultats de la collaboration entre le LIRMM (Laboratoire d'Informatique de Robotique et de Microélectronique de Montpellier, Université de Montpellier - CNRS) et le DRASSM (Département des Recherches Archéologiques Subaquatiques et Sous-Marines, Ministère de la Culture). Travaux en cours, bilan de l'année et perspectives.

-
16h20
Fin de journée