Thèse :
Exploration d'une zone sous-marine étendue par des robots autonomes
Sujet
Cette thèse porte sur un groupe de n robots sous-marins autonomes à bas coût ayant pour mission
d'explorer une étendue relativement importante du fond de l'océan. Les robots ne seront pas autorisés à
faire surface
(sauf au début et à la fin de la mission) et devront s'organiser d'eux-mêmes pour explorer la zone
sans se perdre au fur et à mesure de leur exploration. Le principal objectif du groupe de robots sera
de construire une représentation aussi complète que possible de la zone à explorer (images sonar
ou visuelles, mosaïque sans trous). Pour y parvenir, il faudra limiter au maximum la dérive liée à
l'algorithme de localisation en dead-reckoning. Cette dérive risque d'être particulièrement
importante dans le cas de robots sous-marins à bas coûts, qui ne sont en général pas équipés de
loch-dopplers (pour la mesure de vitesse)
et de centrales inertielles très précises.
Cependant, la dérive peut être limitée théoriquement par une technique de
SLAM
(cartographie et localisation simultanées). Le fond de la mer n'étant pas structuré, il est particulièrement
difficile de détecter automatiquement des amers fiables permettant de faire du SLAM. Nous
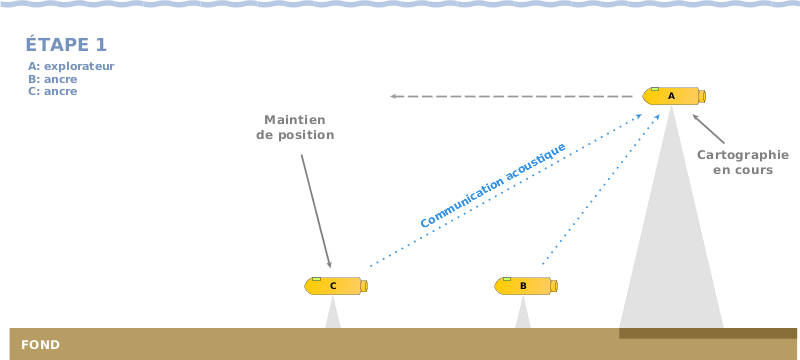
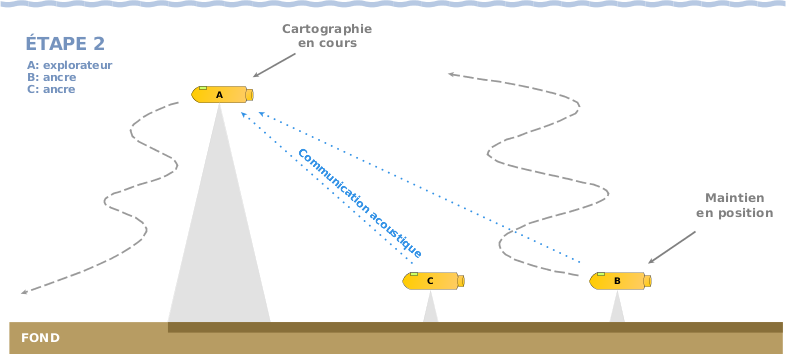
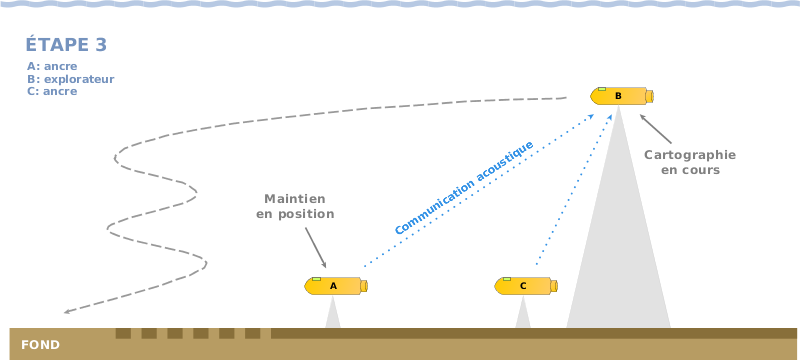
proposons donc d'utiliser certains robots de la meute comme ancres. Les autres robots seront
appelés explorateurs. Pour des raisons de sécurité, les ancres ne seront pas en contact physique
avec le fond, ils seront maintenus en station par un algorithme de stabilisation à partir de l'image de
la caméra de chaque ancre. Pour pouvoir explorer correctement une grande zone sous-marine, les
ancres et explorateurs changeront de rôle alternativement selon l'évolution de la mission. Cette
stratégie d'exploration est appelée une stratégie pas-à-pas, où chaque pas correspond à une
position d'ancrage. Dans un contexte sous-marin, on peut supposer que les robots mesurent leurs
distances entre eux par acoustique (par mesure de temps de vol). Avec cette technique, la dérive de
localisation au cours du temps devrait rester limitée.
L'objectif de la thèse est de développer des méthodes de contrôle et d'estimation permettant
d'effectuer une cartographie fiable et précise en utilisant la stratégie proposée.