Planning
-
1. Static localization
[2cr] Mer 11/03, 13h30-15h25
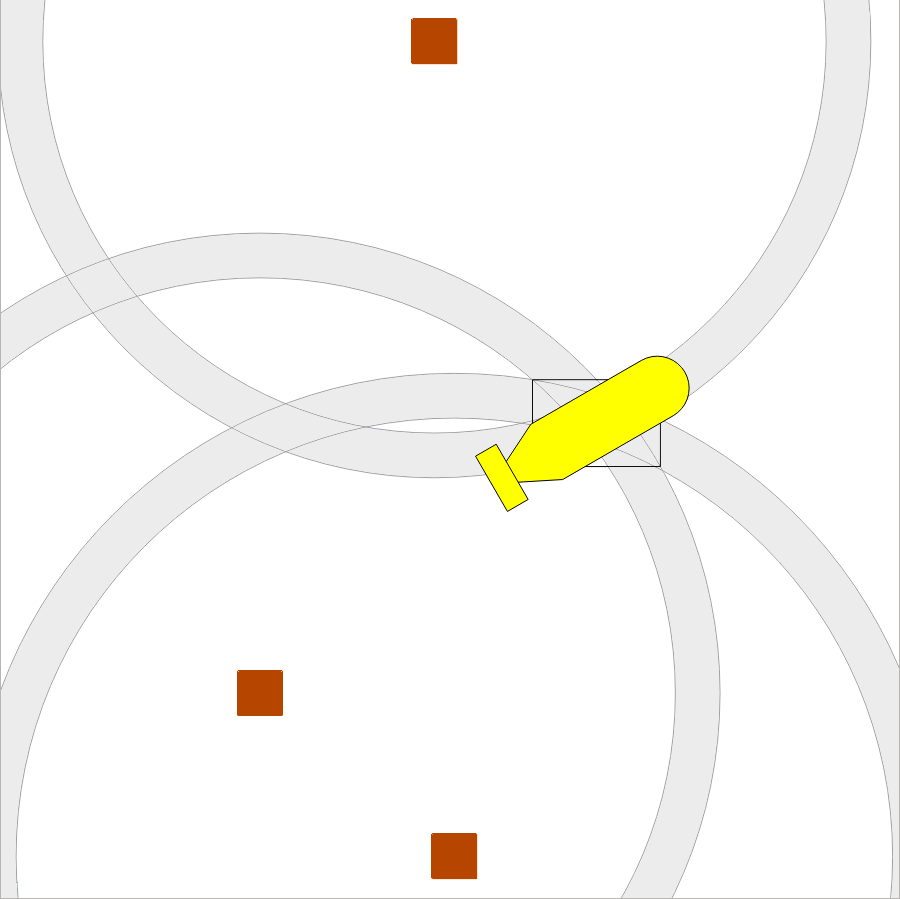
In this lesson, we will perform the state estimation of a static robot between some landmarks. This will be an introduction to intervals, constraints and networks of contractors.
Download the slides
Download the exercises
How to install Tubex? -
2. State estimation by solving data association
[2cr] Ven 20/03, 08h10-10h05
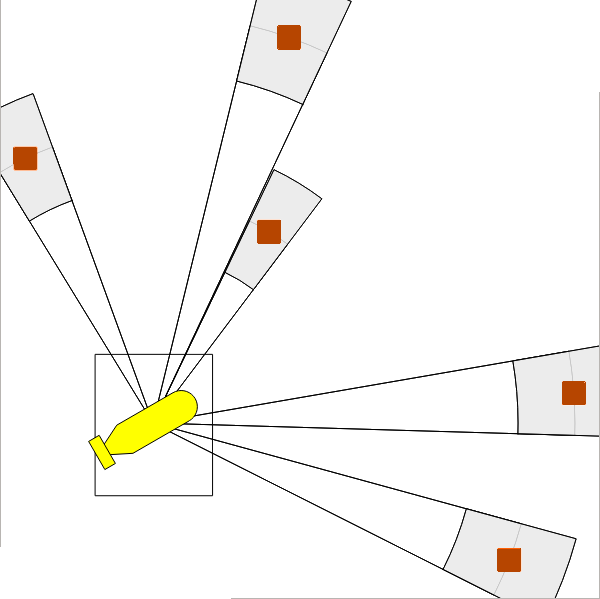
The second lesson will extend the previous exercise by dealing with a data association problem together with localization: the landmarks perceived by the robot are now indistinguishable. The goal of this exercise is to develop our own contractor in order to solve the problem.
Download the exercises
Download the sources of the exercises
Download the sources of the exercises (last Section)
Éléments pour cours à distance :
Suivi en ligne (tableur) de progression
Page du cours sur Moodle
Chat de discussion
Forum d'échanges