-
09h00
Accueil
-
09h30 - 10h10 - Talk 1
Unmotorize ROV gripper to catch profiling floats
Christophe Viel
Télécharger la présentation
This presentation presents an ROV (Remotely Operated underwater Vehicle) gripper for retrieving cylindrical profiling floats. In order to fit several types of ROVs and to be easily installed, the gripper is not motorized, using only the robot’s movements to catch the floats by simply moving forward on them. Then, the gripper uses the turnstile and freewheel concept to grasp and hold the float, with a safety release system to free an unwanted catch. The effectiveness of the clamp was tested in the pool and in the lake, with two actual rescues of lost floats.


-
10h10 - 10h50 - Talk 2
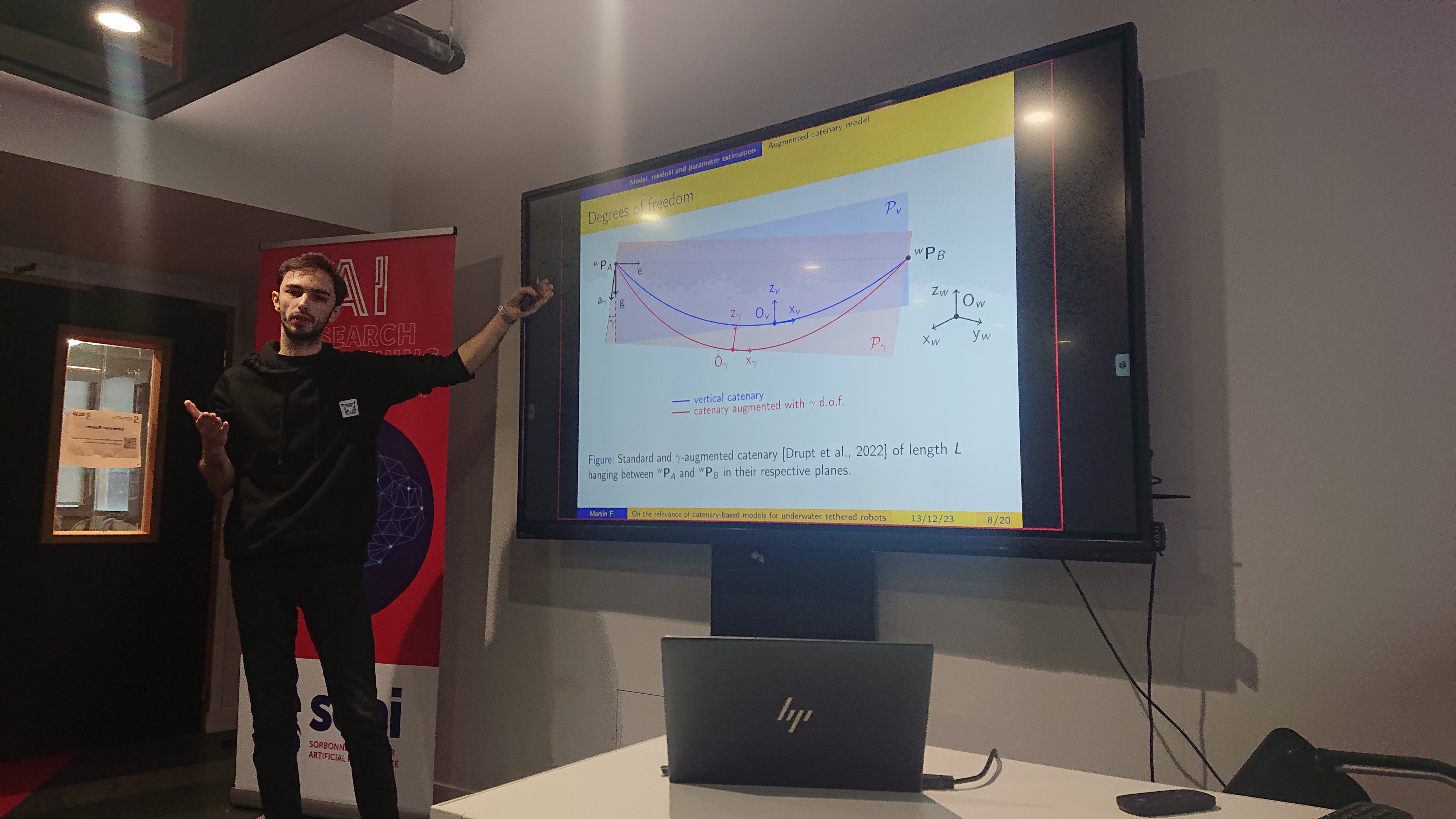
On the relevance of catenary-based models for underwater tethered robots
Martin Filliung
Télécharger la présentation
The presentation proposes a new catenary-based model for tethered underwater robotics. The proposed model add two degrees of freedom to the standard catenary model in order to improve its accuracy in dynamic situations. In order to assess the accuracy of the proposed model, a series of experiment is done in a pool with a robot which performs repeated motion and is attached one of several tethers. All of the experiments are recorded with a motion tracking system. The dataset is then compared to the predicted shapes of the proposed model.


-
10h50 - 11h10
Pause et discussions
-
11h10 - 11h50 - Talk 3
Investigation of the challenges of underwater-visual-monocular-SLAM
Michele Grimaldi
Télécharger la présentation
Dans cet article, nous présentons une étude approfondie des défis posés par les méthodes de localisation et de cartographie monoculaires visuelles simultanées (vSLAM) pour les robots sous-marins. Bien que des progrès significatifs aient été réalisés dans les méthodes d'estimation de l'état qui utilisent des données visuelles au cours de la dernière décennie, la plupart des évaluations ont été limitées à des environnements intérieurs et urbains contrôlés, où des performances impressionnantes ont été démontrées. Cependant, ces techniques n'ont pas été testées de manière approfondie dans des conditions extrêmement difficiles, comme les scénarios sous-marins, où des facteurs tels que les conditions d'eau et de lumière, la trajectoire du robot et la profondeur peuvent avoir un impact considérable sur les performances de l'algorithme. C'est pourquoi notre évaluation est menée dans des scénarios AUV réels ainsi que dans des environnements de laboratoire qui fournissent une référence externe précise. L'accent est mis sur la compréhension de l'impact des conditions environnementales, telles que les propriétés optiques de l'eau et les scénarios d'éclairage, sur les performances des méthodes vSLAM monoculaires. À cette fin, nous montrons tout d'abord que toutes les méthodes sont très performantes dans des environnements aériens, puis que leurs performances se dégradent dans des environnements sous-marins difficiles. L'objectif final de cette étude est d'identifier les techniques qui peuvent améliorer la précision et la robustesse des méthodes SLAM dans de telles conditions. Pour atteindre cet objectif, nous étudions le potentiel des techniques d'amélioration de l'image pour améliorer la qualité des images d'entrée utilisées par les méthodes SLAM, en particulier dans des scénarios de faible visibilité et d'éclairage extrême dans des environnements sous-marins.
-
11h50 - 12h30 - Talk 4
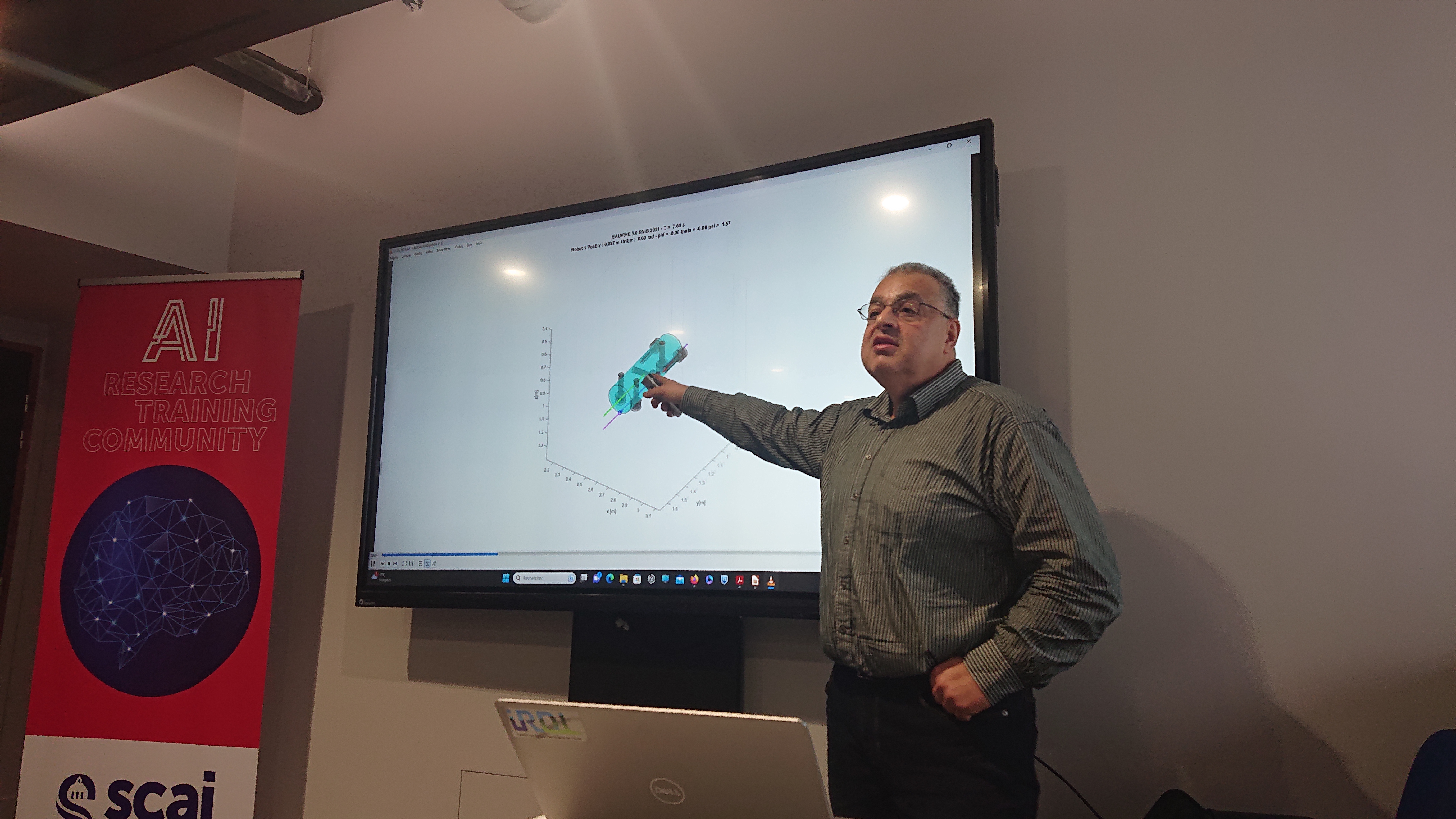
Conception, analyse et commande d'AUV à propulsion reconfigurable et vectorielle
Olivier Chocron
Télécharger la présentation
Le projet RSM s’intéresse à la propulsion vectorielle et à sa commande pour les robots sous-marins autonomes (AUV) agiles, c'est à dire manoeuvrants et dynamiques à la fois. La problématique de l'AUV consiste à atteindre la propulsion nécessaire à la mission en reconfigurant son système de propulsion pour s'adapter aux exigences variables de la mission, sans pour autant disposer d'un actionnement sur tous ses degrés de liberté (DDL). L'AUV peut soit opérer une reconfiguration dynamique de ses vecteurs de poussée sur les DDL de la tâche en cours, soit utiliser l'ensemble des DDL en mode vectoriel. Cette présentation aborde les trois points clefs de la propulsion vectorielle reconfigurable: la synthèse d'une configuration sous-actionnée adaptée ; la technologie du propulseur magnéto-couplé reconfigurable (PMCR) et la commande généralisée des AUV vectoriels.


-
12h30 - 13h50
Pause déjeuner libre
Repas non prévus, mais facilités pour se restaurer à l'extérieur.
-
13h50 - 14h00 - Talk 5
Présentation du SubMeeting 2024 (27-31 mai 2024, St-Raphaël)
Claire Dune, Loïca Avanthey, Laurent Beaudoin, Christophe Viel
Télécharger la présentation
Page web de l'évènement : https://submeeting2024.univ-tln.fr

-
14h00 - 14h40 - Talk 6
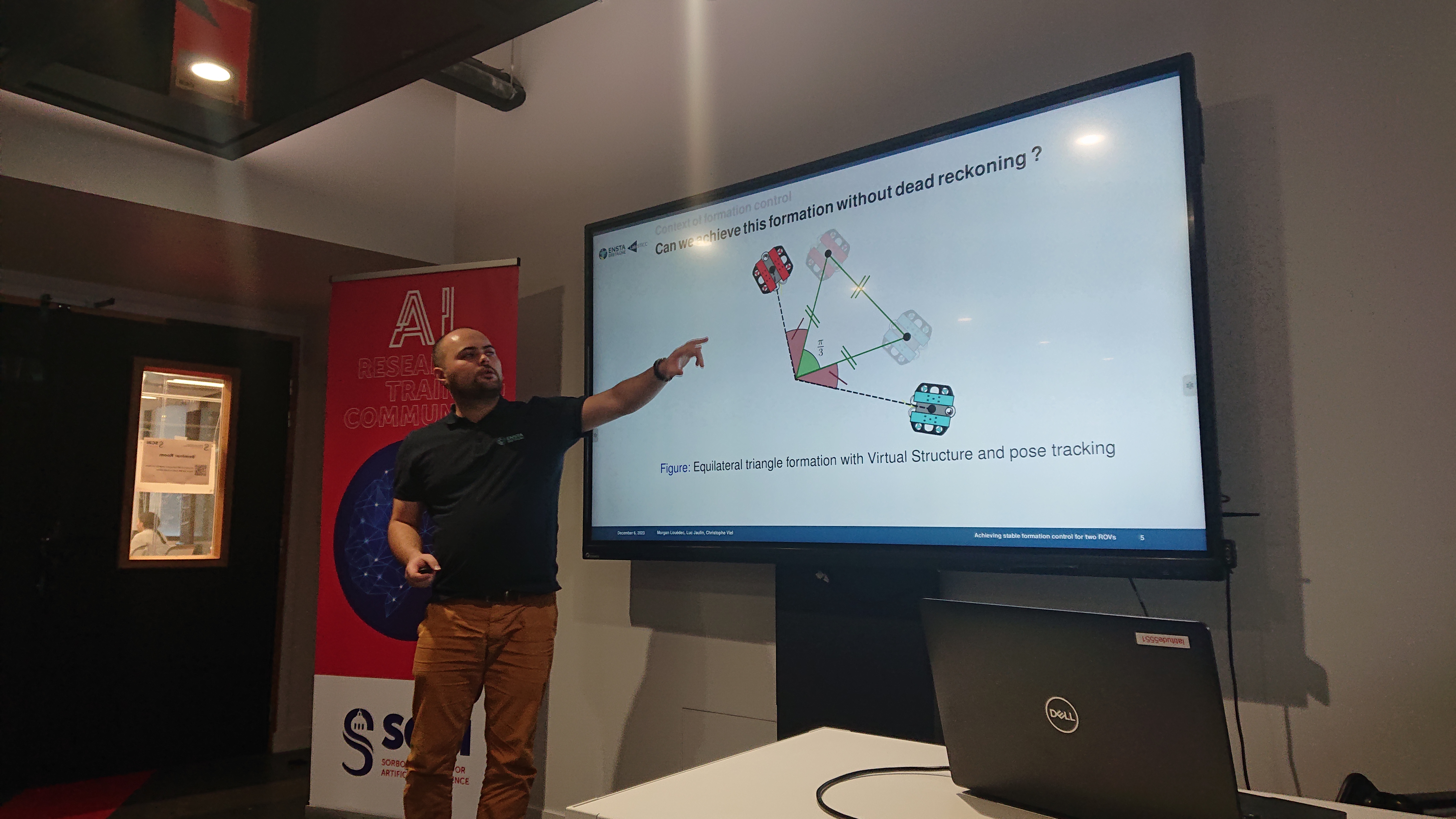
Achieving stable formation control for two ROVs
Morgan Louédec
Télécharger la présentation
The topic of formation control for underwater robots has received a lot of attention over the last decade. Although many theoretical solutions have been proposed to control groups of underwater robots, stability proofs are only given on the basis of simple system modeling and the implementation of formation control on real systems is still rare. In this context, we heve studied a formation control problem for two ROVs (Remotely Operated underwater Vehicle), assuming that the position measurement by acoustic USBL (Ulstra Short Baseline) can only make one measure every 3 seconds. Proof of stability was obtained using a new numerical method based on guaranteed integration. Then, the formation control was implemented on two ROVs at the Lac of Guerledan during the Drone & Cap seminary on November 2023.
-
14h40 - 15h20 - Talk 7
Underwater navigation based on passive electric sense: new perspectives for underwater docking
Vincent Lebastard
Télécharger la présentation
Dans le domaine de la robotique sous-marine, plusieurs techniques de d'amarrage (ou docking) sont actuellement à l'étude. Elles visent à faciliter la récupération des véhicules sous-marins, ainsi que leur connexion à des stations sous-marines pour le chargement des batteries et l'échange de données. La mise au point de stratégies fiables d'amarrage sous l'eau est une question cruciale, en particulier dans les eaux troubles et/ou dans les environnements confinés et encombrés. Les capteurs sous-marins couramment utilisés, tels que les sonars et les caméras, peuvent être limités dans ces conditions. Nous montrons comment un capteur bio-inspiré peut être utilisé pour guider un robot sous-marin pendant une phase d'amarrage. Le capteur s'inspire de la capacité d'électro-localisation passive des poissons électriques. En exploitant les interactions électriques et la morphologie du véhicule, une loi de contrôle réactive basée sur le capteur est proposée. Elle permet de guider le robot vers la station d'amarrage en suivant un champ électrique exogène généré par un ensemble d'électrodes fixées à l'environnement. En plus du docking, nous présenterons une mise en œuvre d'un retour haptique pour aider à la téléopération sous-marine (navigation et effort au branchement de câble). À des fins d'illustration concrète, nous abordons la question du positionnement de deux connecteurs sous-marins avant leur insertion. À cette fin, le connecteur fixe est équipé d'un dipôle électrique actif qui génère un champ électrique dans l'environnement aqueux. Ce champ ambiant est détecté par une sonde électrique passive attachée à un manipulateur télécommandé, et utilisé pour émuler une force dont la valeur zéro dénote la position souhaitée de la sonde par rapport au dipôle actif.


-
15h20 - 15h40
Pause et discussions
-
15h40 - 16h20 - Talk 8
Reliable underwater SLAM using seabed roughness
Simon Rohou, Michel Legris
Télécharger la présentation
In this presentation, we will present a new Simultaneous Localization And Mapping method for reducing the drift of an Autonomous Underwater Vehicle equipped with inertial sensors and a multibeam echosounder. The robot is able to build a bathymetric map of the environment with its acoustic sensor. The resulting Digital Elevation Model can be used for volumetric SLAM. However, the loop closure will be more difficult to process in case of flat seabed, where the bathymetry is constant: the algorithm may even converge to false estimates in case of redundancies in the environment. In order to overcome these situations, we propose to exploit the roughness of the seabed for loop closure (high-frequency artifacts such as ripples, grooves, small rocks). These observations will be involved in a reliable SLAM algorithm based on interval methods, in order to avoid false loops closures. The approach will be demonstrated on an actual experiment at sea.
-
16h30
Fin de journée





 Participer à la réunion Teams
Participer à la réunion Teams