Programmation 2024/2025 (36 créneaux)
-
1. Introduction au C++
[4cr] 09/09
CM 01 : Introduction au C++
QCM du CM 01 prévu pour le 16/09
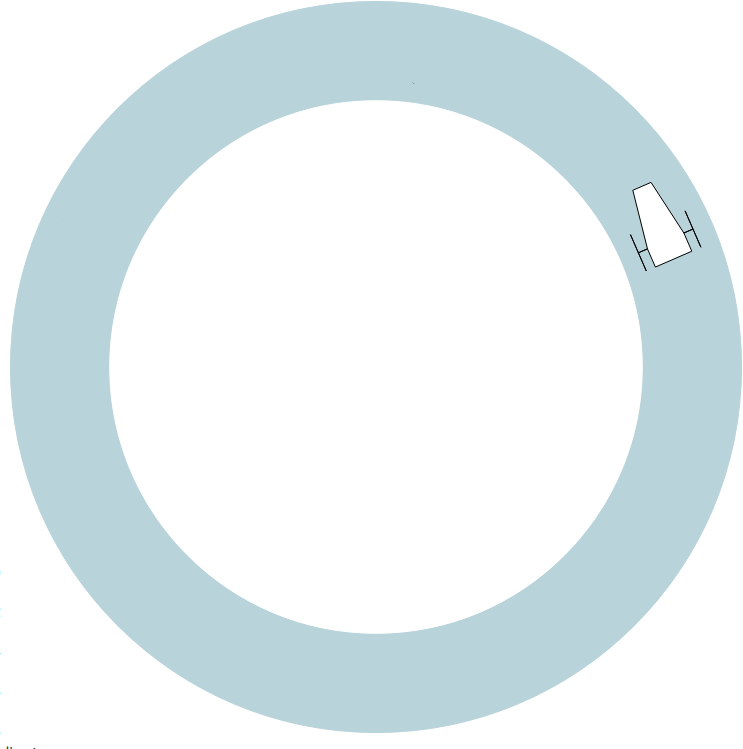
TD 01 : Simuler une voiture sur une route circulaire
TD 01 à rendre pour le 15/09 minuit
TD 01 : correction
Utiliser le type float ou le type double ?
Pour utiliser le AppImage de VIBes sur Ubuntu 22.04 :
sudo chmod u+x VIBes-0.2.3-linux.AppImage
sudo apt install libfuse2
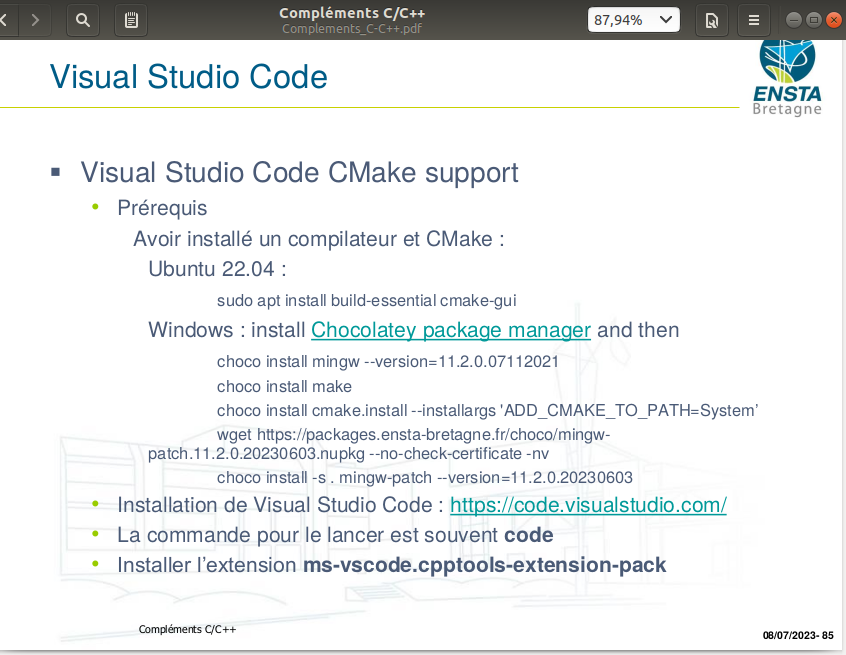
En attendant Linux : instructions pour installer g++ sur Windows (slide venant du cours de F. Le Bars)
Notice d'installation de WSL2 (merci à Hippolyte Lafrad) -
2. Programmation orientée objet
[4cr] 16/09
[4cr] 03/10
CM 02 : Programmation orientée objet
QCM du CM 02 prévu pour le 03/10
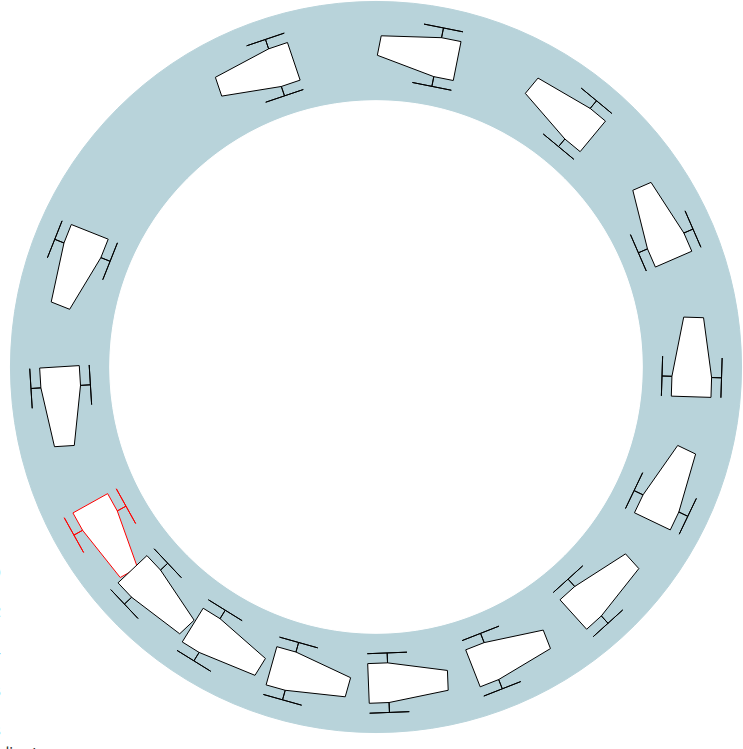
TD 02 : Platooning (n voitures autonomes)
TD 02 à rendre pour le 12/10 minuit
Résultat attendu à la fin du TD :
TD 02 : correction
Vidéo de correction du TD 02 :
-

Pour le cours sur CMake, Git, etc. voir la section 5. Outils de développement
-
3. Tableaux et pointeurs
[4cr] 13/10
CM 03 : tableaux et pointeurs
QCM du CM 03 prévu pour le 21/10
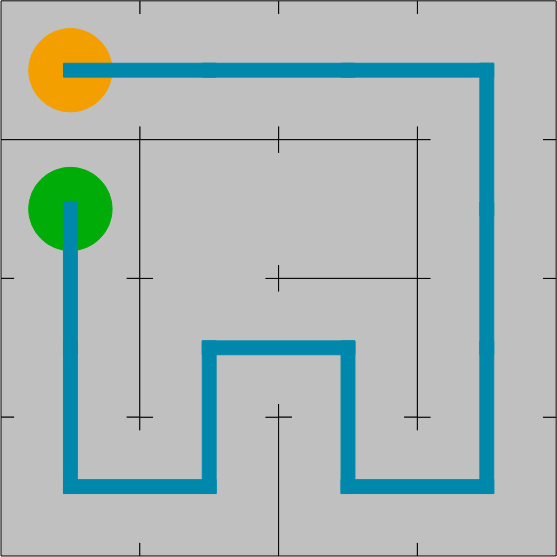
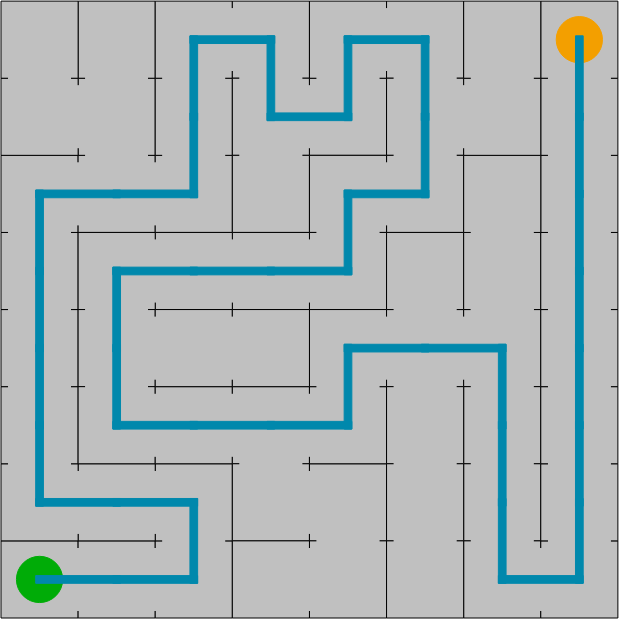
TD 03 : résoudre un labyrinthe
TD 03 à rendre pour le 16/11 minuit
TD 03 : correction
Vidéo de correction du TD 03 :
-
4. Fichiers et conteneurs
[4cr] 21/10
Cours 04 : fichiers et conteneurs
QCM du CM 04 prévu pour le 17/11
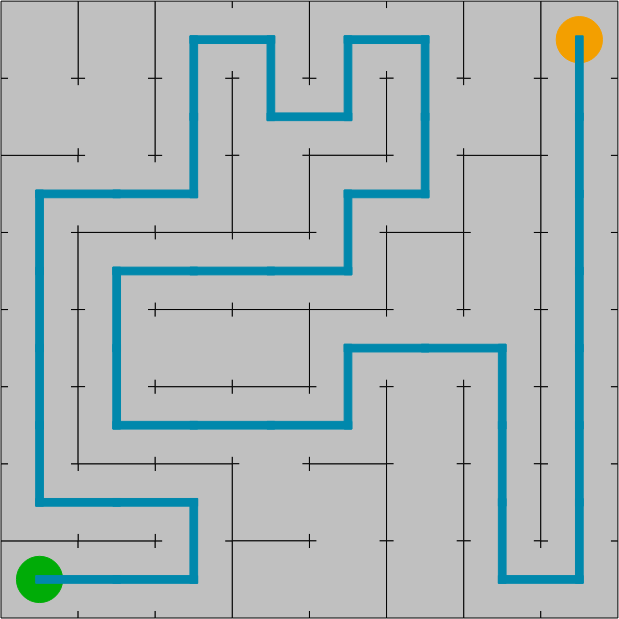
TD 04 : sérialiser un labyrinthe
TD 04 à rendre pour le23/11 minuit26/11 minuit (date limite étendue)
Labyrinthes à télécharger :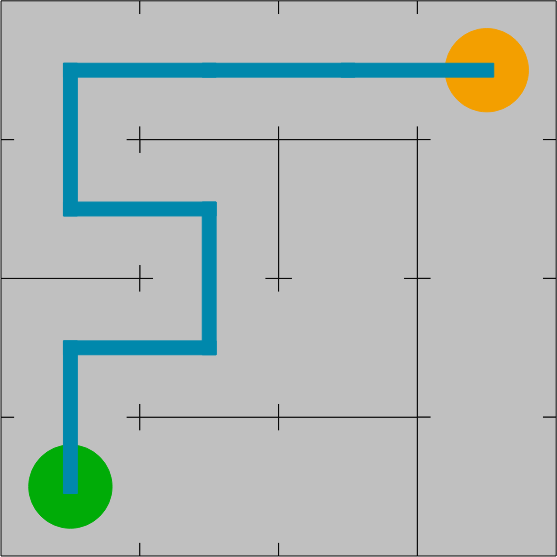
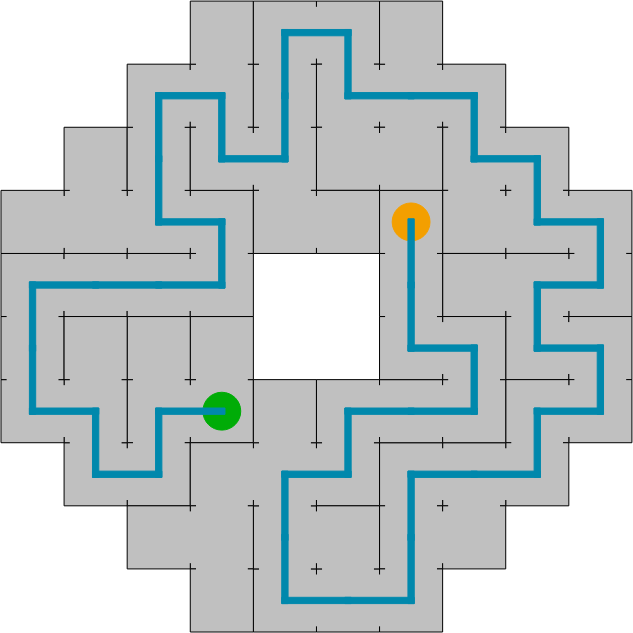
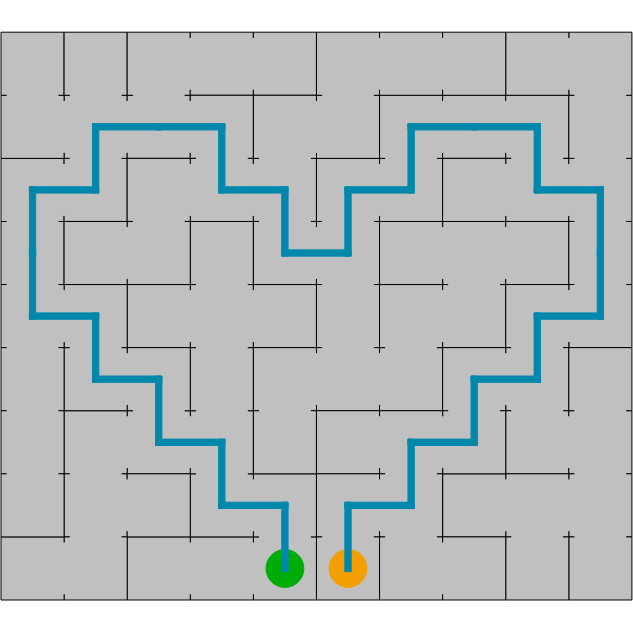
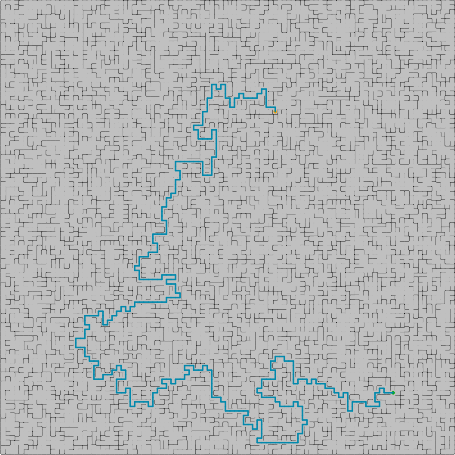
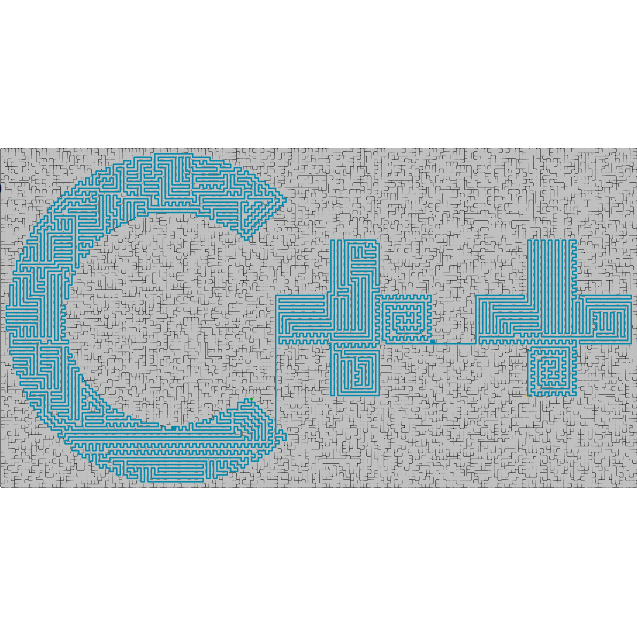
Génération de chemin de labyrinthe à partir d'une image :
https://github.com/LancelotRC/Covering-unique-path-on-a-complex-shape
Outil proposé par Lancelot Ramis-Cladera -
5. Outils de développement
[1cr] 17/11
Cours 05 : outils de développement
QCM du CM 05 (slides 1-24) prévu pour le 27/11 -
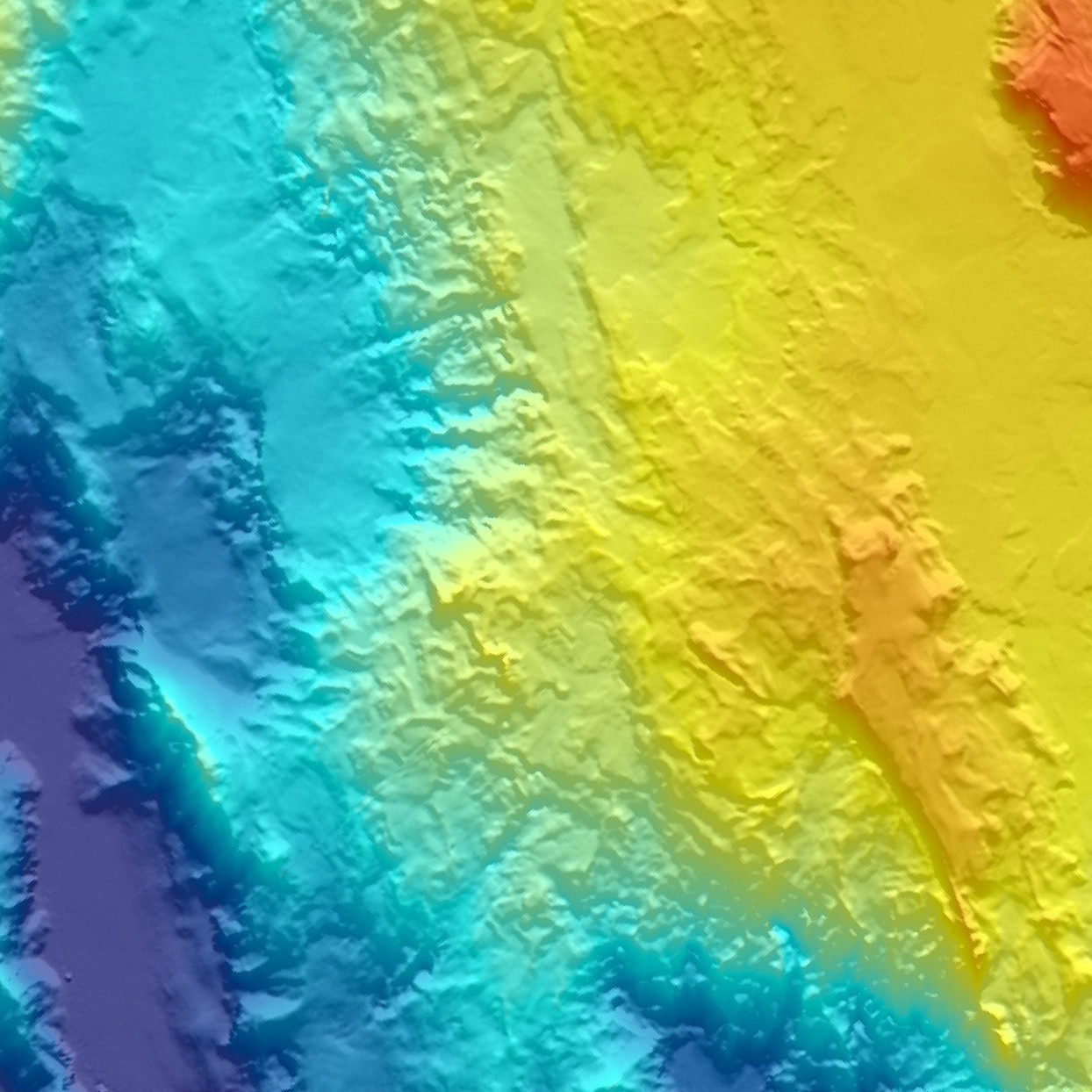
6. Projet MNT : Modèle Numérique de Terrain
Présentation du projet
Proj :
Proj : quick start
Proj : configurer CMake (voir aussi : un autre CMakeLists.txt)
Proj : une configuration possible pour WGS84 -> Lambert93
Proj : exemple simple d'utilisation/configuration de Proj pour votre projet
Comprendre comment optimiser la recherche de triangles dans le maillage (slides)
(optionnel) Infos pour ombrage (hillshading) (ArcGIS)
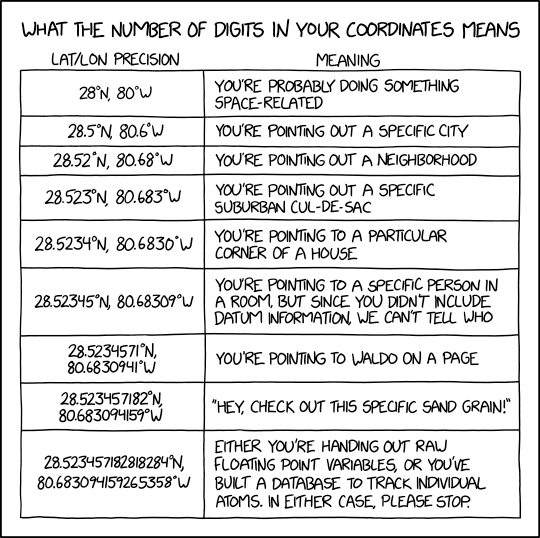
Comprendre pourquoi les coordonnées Lambert93 sont grandes en Nord
Configuration VSCode : exécuter votre programme avec arguments
Delaunator : dépôt GitHub
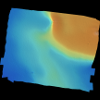 MNT d'une portion de la rade de Brest
MNT d'une portion de la rade de Brest
- réalisé par l'ENSTA Bretagne / Shom (Brest)
- 2018, 1m, WGS84
- rendu en HD avec ombrages
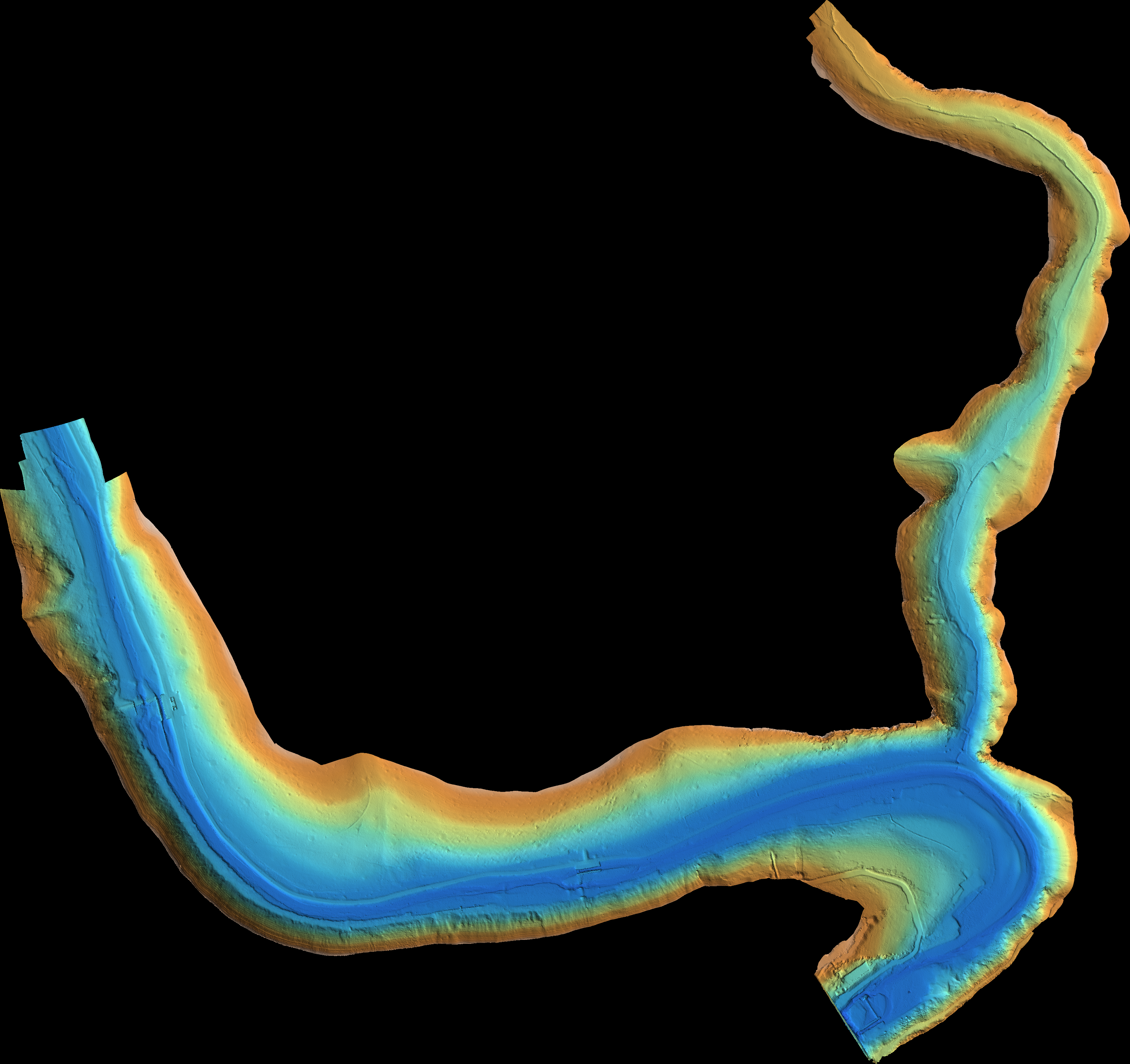
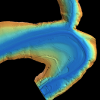 MNT du Lac de Guerlédan
MNT du Lac de Guerlédan
- réalisé par l'ENSTA Bretagne (Brest)
- février 2019, 0.5m, WGS84
- rendu en HD avec ombrages -
7. Évaluation
[4cr] 18/12, 08h10-12h15

{kind=link}
{kind=link}
{kind=link}